
We have been sharing information & knowledge on Drones and Counter Drone Systems till now. Now, imagine a scenario with multiple drones, collectively referred to as Swarm Drones. We bring you a thread on Swarm Technologies in the upcoming two part series of blogs.
The concept of drone swarms has been inspired in part by the behaviour of certain animals in nature, such as flocks of birds, schools of fish, and colonies of insects. These natural systems exhibit complex and dynamic behaviours that emerge from the interactions of individual members within the group.
Origins of Swarm Drones
Swarms were first demonstrated in the USA in 2016. It was made by students of Massachusetts Institute of Technology from commercially available hardware modules. While these students are blessed with exceptionally high IQ, it also demonstrated the ease with which this technology can proliferate all over the world. China demonstrated a swarm of 48 drones launched by a tubular launcher in tactical conditions in Oct 2020. While the exact type of drone is not known it is likely to have been the CH 901 drone which has an endurance of 2 hours and a cruising speed of 65 – 105 kmph.India has demonstrated a capability of 75 drone swarm in Jan 2021. The unique feature in this demonstration was the use of heterogeneous drones.
Application of Swarm Drones
Swarms are used in situations where geographical area to be covered is large and situation is time critical where a single drone would be ineffective on account of its limited flying time and coverage. In civilian applications they are ideal for disaster management and monitoring/ surveillance since reliability of a self-healing swarm is greater. In military applications, they are launched in support of tactical missions due to their ability to overwhelm Air Defences as they are undetectable and extremely lethal due to their survivability.
Configurations of Swarm Drones
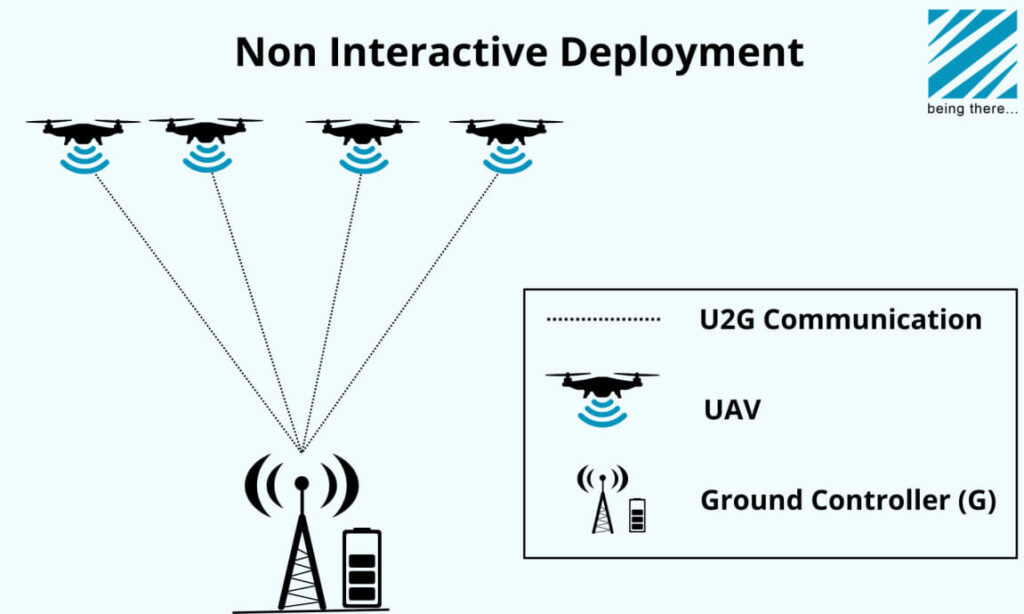
Drone Swarms can be deployed in various configurations. In a non-interactive deployment the individual drones are controlled by a Ground Controller Station(GCS). This permits relatively more efficient use of payload of the drone as a relatively higher power Computer in the GCS which can take on the computational and networking load.
Swarms can also be deployed as multiple clusters with each cluster head controlling the drones within its cluster. This configuration extends the range of the swarm since only each cluster head needs to be in communication with the GCS. The cluster head would need on-board computational and networking hardware thus increasing its size.

Flying Wireless ad-hoc networks that do not rely on existing infrastructure to establish the network, show promise for utilisation in autonomous drone swarms with only one member of the swarm required to communicate with the GCS. With this flexibility and resilience of the Swarm increases manifold as the roles are interchangeable.

With this we come to an end with Part 1 of the Swarm Technologies Series. We now know the origins of Swarm Drones, their applications and various configurations in which they can operate. In the upcoming blog, we will give you an insight into Swarm Intelligence – A technological phenomenon where drones communicate with each other & execute instructions.



